Research
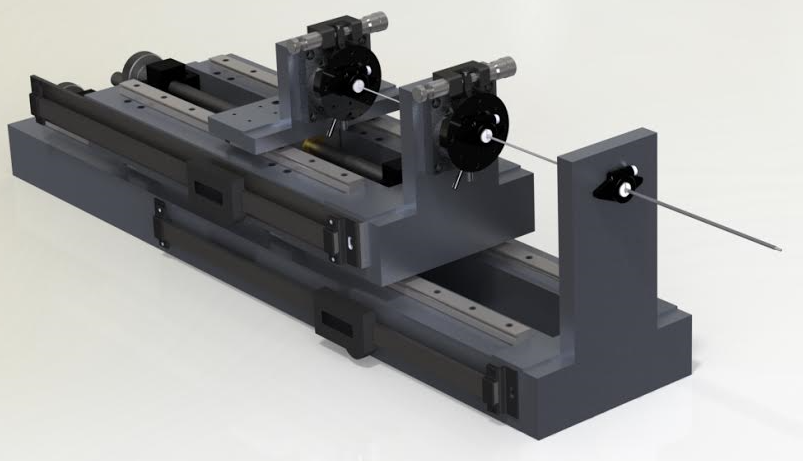
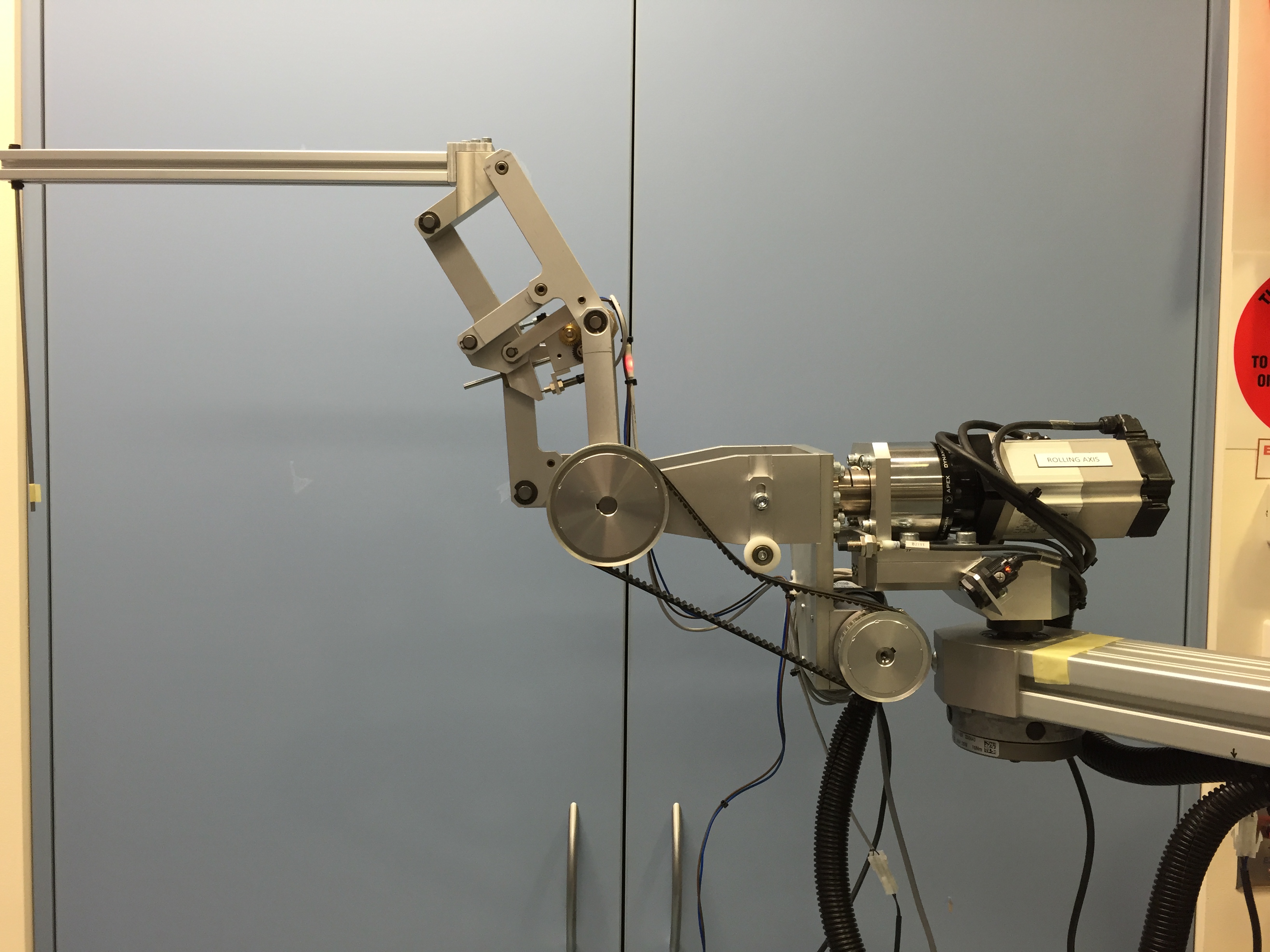
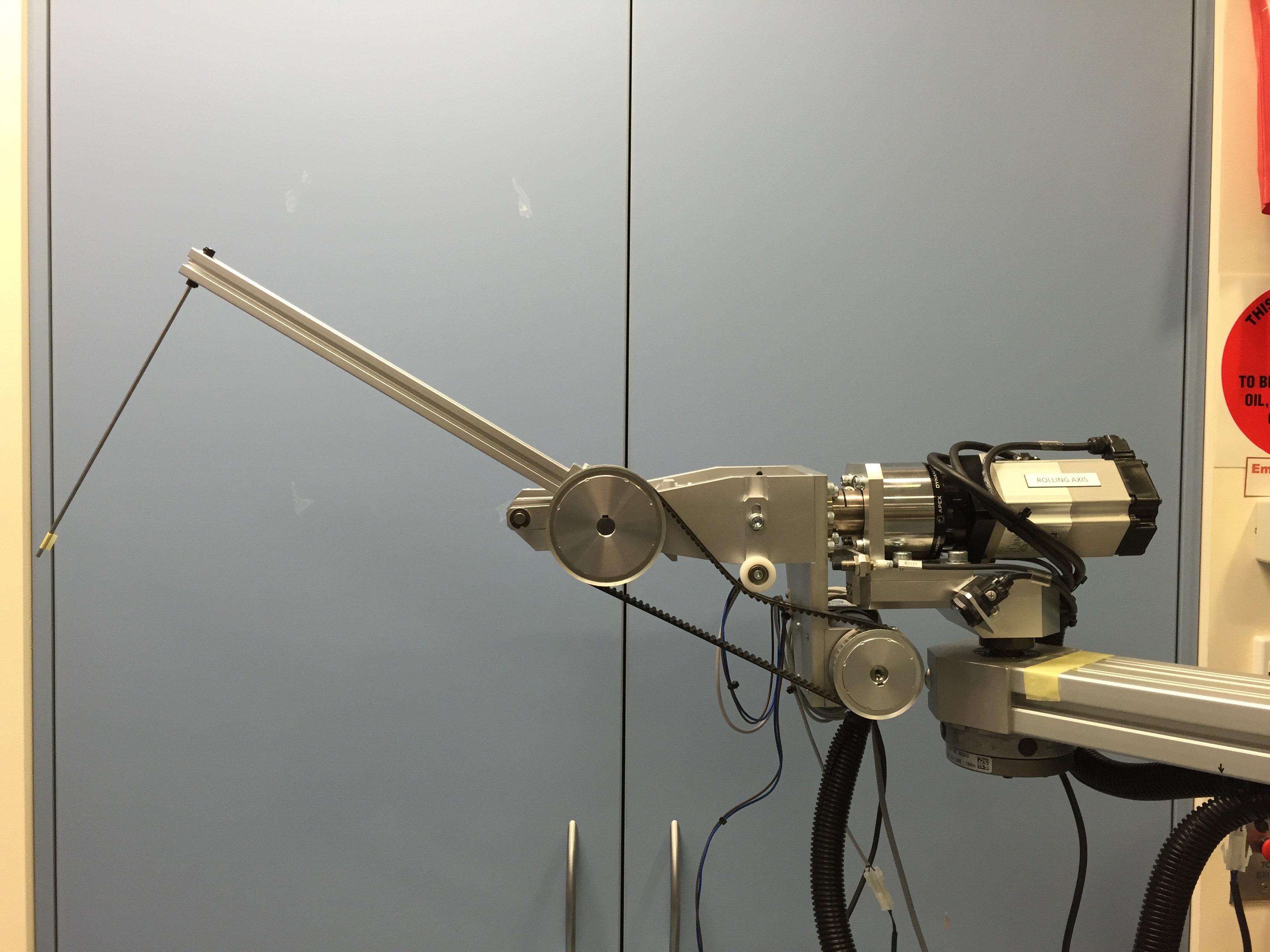
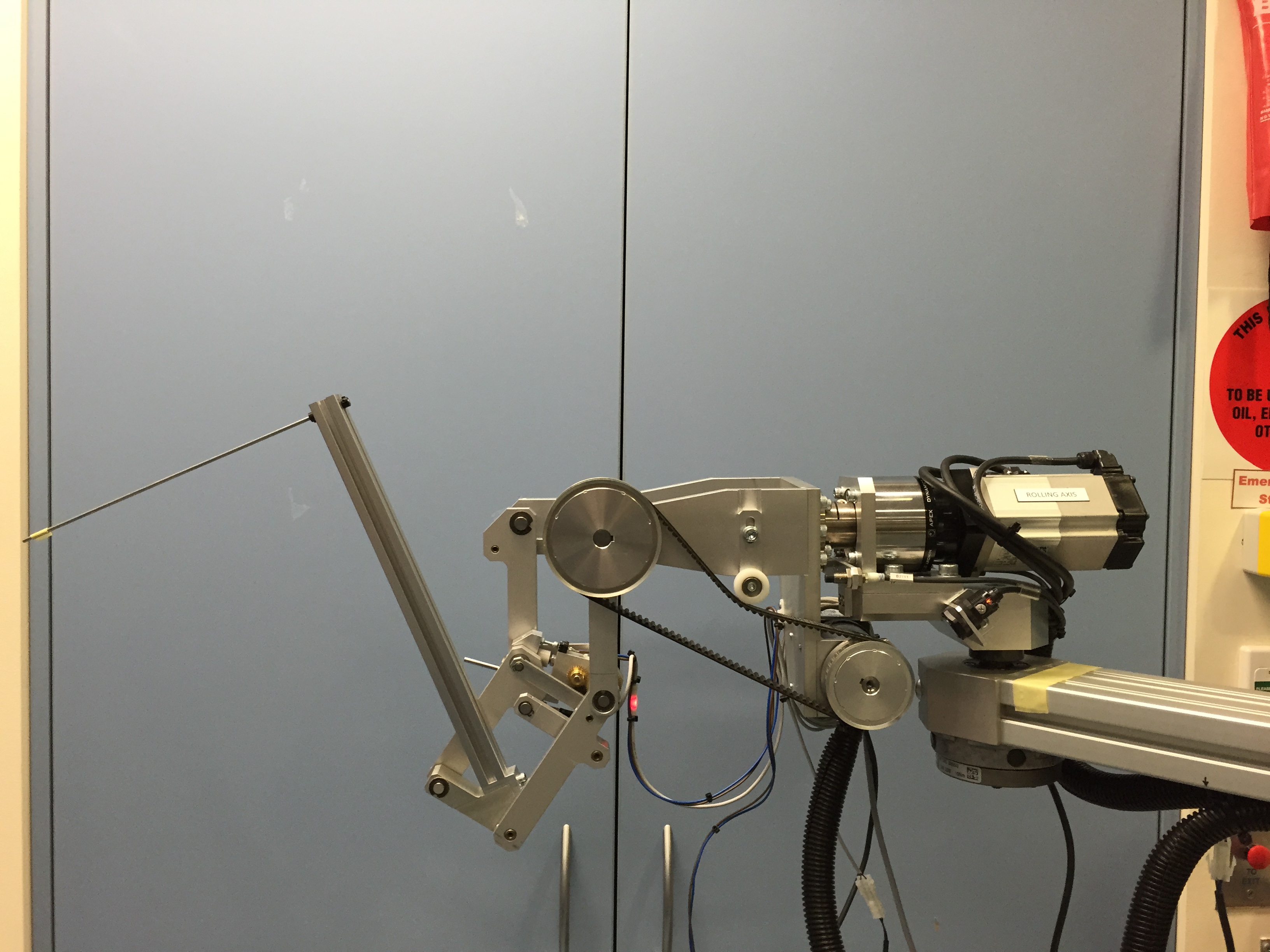
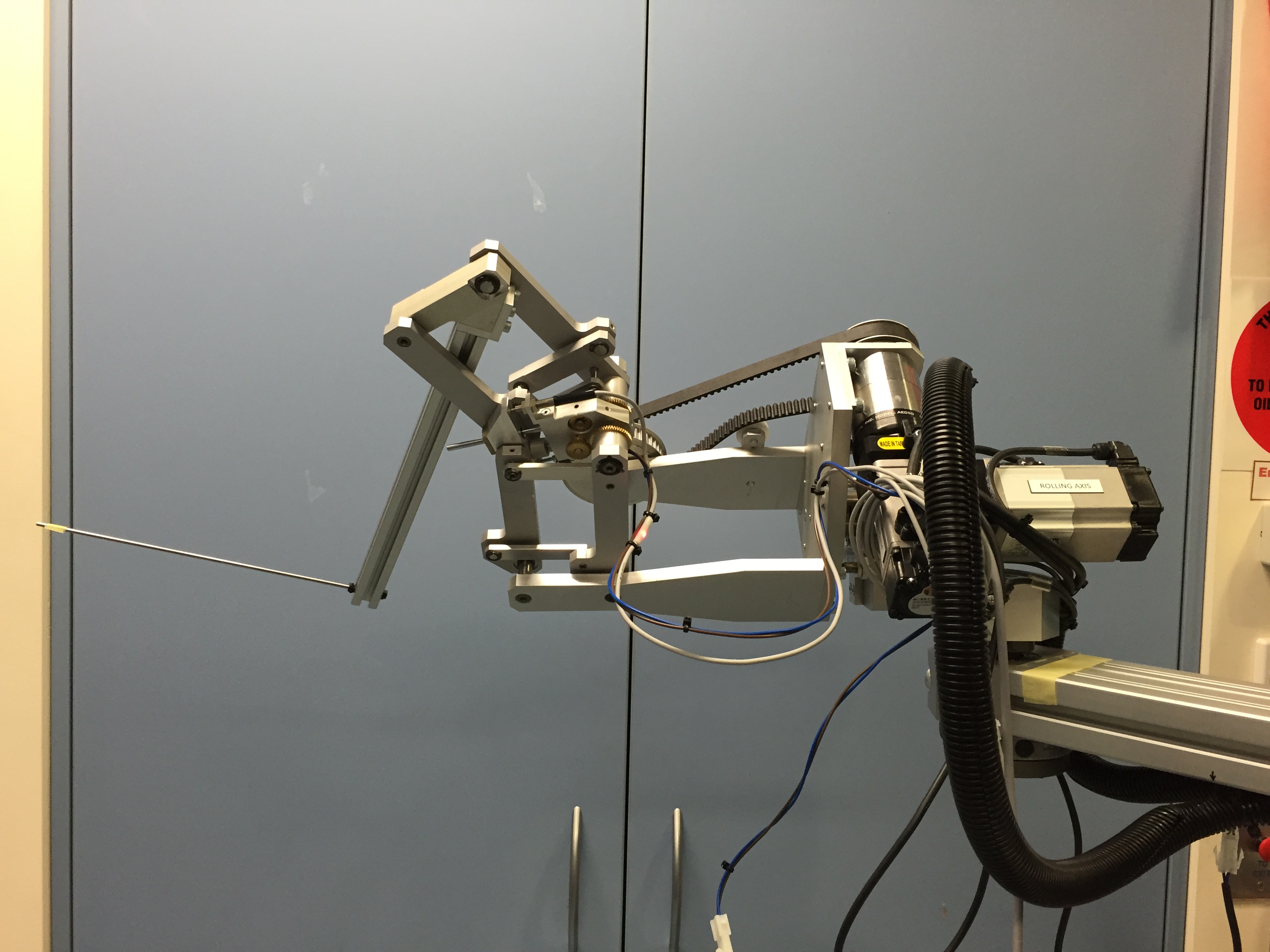
Robotic Surgical Arm with Remote Centre of Motion (RCM)
This project targets to develop a surgical robot with remote centre of motion (RCM) for minimally invasive surgery (MIS)
robot. The objectives are to minimise the footprint of robotic arms
during surgery, avoid collision between arms, and elongate workspace of
each arm. A novel RCM mechanism was invented for this purpose.
Auxiliary mechanisms were introduced to increase the range of motion.
(click to access the short
introduction video)
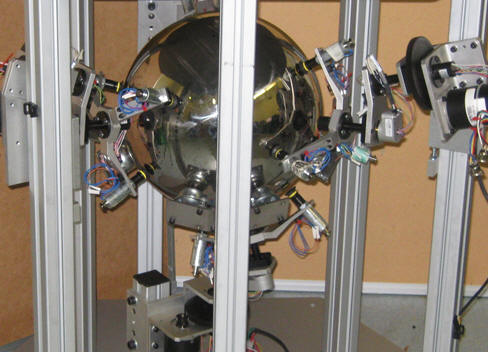
Reconfigurable Spherical Motion Generator (RSMG)
Recongurable
Spherical Motion Generator (RSMG) is developed to provide continuous
unlimited spherical motion. It has potential application in the motion
base of flight simulators. Four robotic arms and
reconfiguration/redundant control strategy are used to overcome the
parallel and serial singularities.
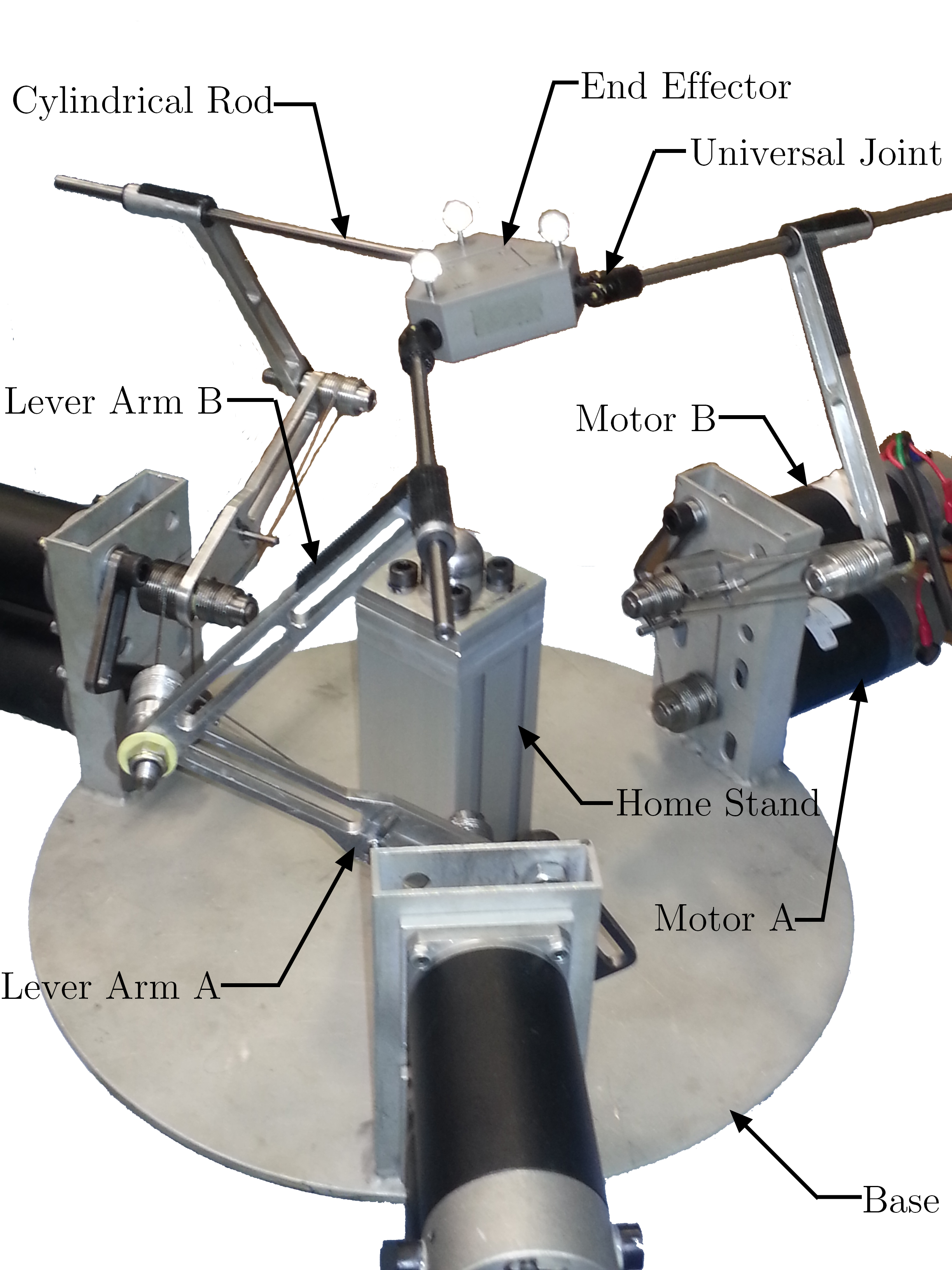
Monash Epicyclic Parallel Manipulator (MEPaM) for Haptic Force Feedback
The objective is to develop a transparent haptic device with relatively
large force-feedback. The MEPaM is a novel three legged six degree of
freedom parallel mechanism with all base mounted actuators. The
suitability of MEPaM as an impedance type haptic device is investigated
by interaction with virtual environments.
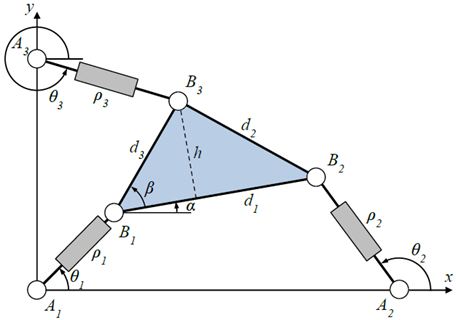
Path Planning of Parallel Manipulators in Configuration Space
We aim to solve the problem of path planning of parallel manipulators by using global workspace road maps. Planning trajectories for high DOF parallel manipulators is complex and resource-intensive due to the presence of parallel singularities and serial singularities. The global workspace road map can show the connectibity between any two configurations. A new concept of rotary disc search was developed to achieve the global road map.
Power Flow Analysis of Epicyclic Gear Transmissions
Epicyclic gear transmissions have many applications. The internal power flow of epicyclic systems is highly related to the power loss of the system. We aim to develop systematic and complete approaches to obtain the full map of power flow of any given complicated epicyclic system. Two approaches have been developd complementary to each other. One is based on constraints while the other is based on virtual power balance.

Mobility and Workspace Analysis of Robots and Mechanisms
Continuum Concentric Tube Robot (CCTR) for Minimally-Invasive Surgical Applications
The continuum concentric tube robots (CCTRs) are constantly bending, infinite degree-of-freedom (DOF) robots with elastic structure. Their simple and flexible structure, along with the capability to be navigated actively, can benefit minimallyinvasive surgical applications. This project targets to improve the modelling accuracy and solution speed of CCTR models, and explore the applications of CCTR in minimally-invasive surgeries.