Publications
Scholarly Book
Chen, C. and Zsombor-Murray, P., 2009, Direct Kinematics for All Planar Three-Legged Parallel Platforms (Kinematic Mapping), VDM Verlag, ISBN: 978-3-639-15037-7.
Scholarly Book Chapters
S. Ip, C. Chen, R.P.H. Chen, and D. Oetomo, 2012, Development of Reconfigurable Spherical Motion Generator, Advances in Reconfigurable Mechanisms and Robots I, 285-293, Springer, London.
Referred Journals articles
2016
W Au, H Chung and C Chen, Path planning and assemly mode changes of 6-DOF Stewart-Gough-type parallel manipulators, Mechanism and Machine Theory, vol. 106, pp. 30-49, 2016.
S. Liu, B. Chen, S. Caro, S. Briot, L. Harewood and C. Chen, A cable linkage with remote centre of motion, Mechanism and Machine Theory, vol. 105, pp. 583–605, 2016.
C Chen, Path planning in distorted configuration space, Robotica, 2016.
S Liu, L Harewood, B Chen and C Chen, A Sekeletal Prototype of Surgical Arm Based on Dual-Triangular Mechanism, Journal of Mechanisms and Robotics, 8(4), 041015.
S Abeywardena and C Chen, Inverse dynamic modelling of a three-legged
six-degree-of-freedom parallel mechanism, Multibody Syatem Dynamics,
DIO10.1007/s11044-016-9506-y.
2015
C Chen, Path Planning in Distorted Configuration Space, Accepted by Robotica, Oct 2015.
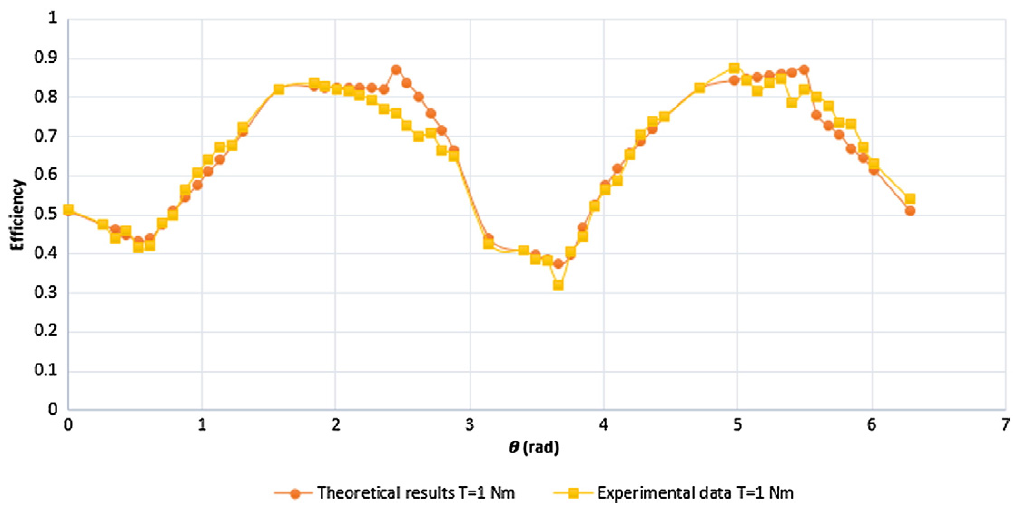
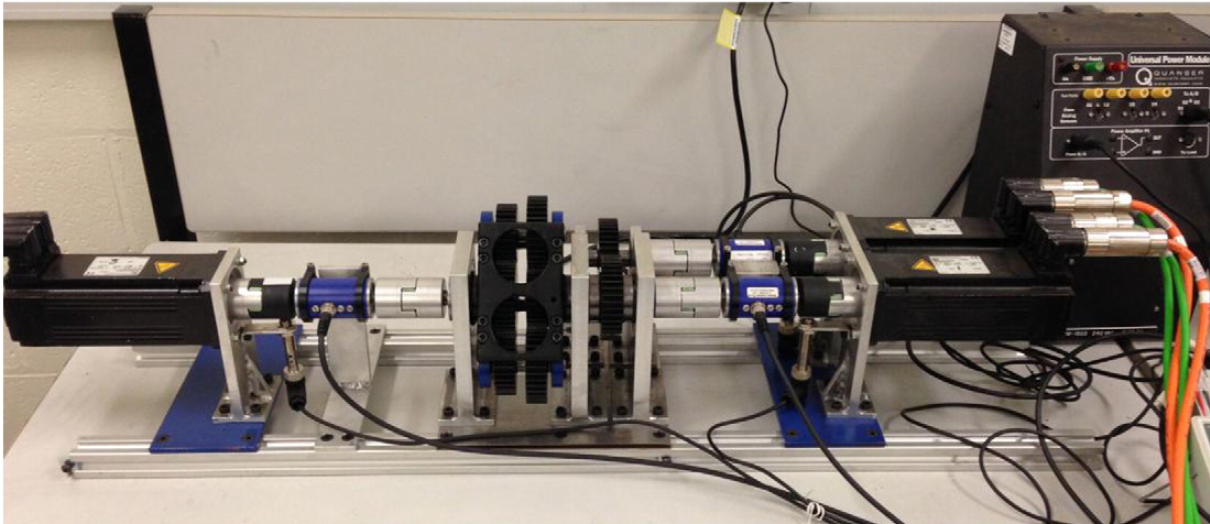
C Chen and J Chen, 2015, Efficiency analysis of two degrees of freedom epicyclic gear transmission and experimental validation, Mechanism and Machine Theory, 87, pp. 115–130.
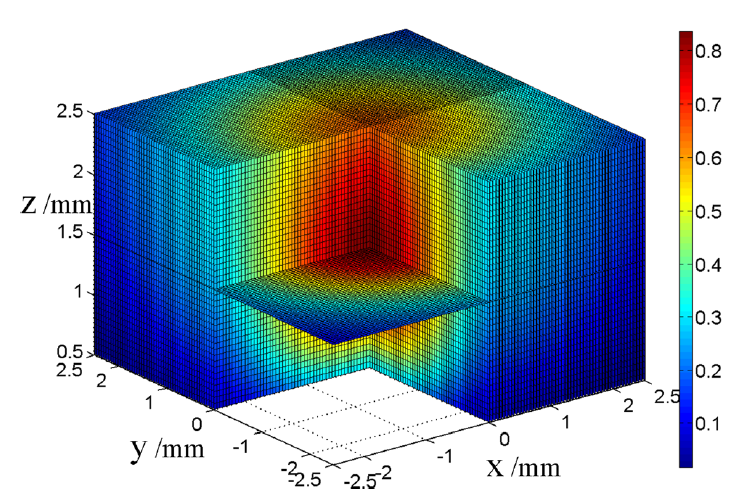
X Chen, C Chen, and XJ Liu, 2015,
Evaluation of force/torque transmission quality for parallel manipulators, ASME Journal of Mechanism and Robotics, 7 (4), 041013.
2014
W Au, H Chung, and C Chen, 2014, Generation of the global workspace roadmap of the 3-RPR using rotary disk search, Mechanism and Machine Theory, 78, pp. 248 – 262.
2013
H Liu, HQ Tian, C Chen, and YF Li, 2013, An experimental investigation of two Wavelet-MLP hybrid frameworks for wind speed prediction using GA and PSO optimization, International Journal of Electrical Power & Energy Systems, 52, 161-173.
2012
Chen, C., 2012, Power
Analysis of Epicyclic Transmissions Based on Constraints, ASME Journal of
Mechanism and Robotics (in press), March.
Chen, C., 2012, Power Flow and Efficiency Analysis of
Epicyclic Gear Transmission with Split Power, Mechanism and Machine Theory
(in press), April.
Davies, K., Chen, C., and Chen, B.K., 2012, Complete
Efficiency Analysis of Epicyclic Gear Train With Two 2 Degrees of Freedom,
ASME Journal of Mechanical Design (in press), Februray.
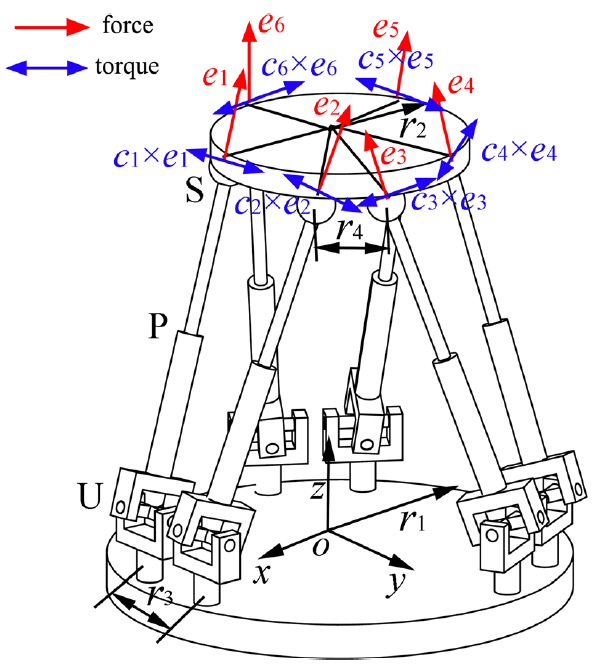
Chen, C., Gayral, T., Caro, S., Chablat, D., Moroz,
G., Abeywardena S., A, 2012, Six-Dof Epicyclic-Parallel Manipulator, ASME
Journal of Mechanism and Robotics (in press), January.
Liu, H., Chen, C., Tian, H.Q., and Li, Y.F., Hybrid
Model for Wind Speed Prediction Using Empirical Mode Decomposition and
Artificial Neural Networks, accepted by Renewable Energy.
2011
Chen, C., 2011, The order of local mobility of
mechanisms, Mechanism and Machine Theory [P], vol 46, issue 9,
Pergamon-Elsevier Science Ltd, Oxford UK, pp. 1251-1264.
Chen, C., 2011, Power flow analysis of compound
epicyclic gear transmission: Simpson gear train, Journal of Mechanical
Design - Transactions of the ASME [P], vol 133, issue 9, ASME - American
Soc. Mechanical Eng., New York USA, pp. 1-5.
Chen, C., Jackson, D., 2011, Parameterization and
evaluation of robotic orientation workspace: A geometric treatment, IEEE
Transactions on Robotics [P], vol 27, issue 4, IEEE, Piscataway New Jersey
USA, pp. 656-663.
Chen, C., Teh, L., 2011, Theoretic study of
efficiency of two-DOFs of epicyclic gear transmission via virtual power,
Journal of Mechanical Design - Transactions of the ASME [P], vol 133, issue
3, ASME, New York USA, pp. 1-7.
2010
Chen, C., 2010, Mobility analysis of parallel
manipulators and pattern of transform matrix, Journal of Mechanisms and
Robotics [P], vol 2, issue 4, ASME International, United States, pp. 1-11.
Liu, H., Tian,
H., Chen, C., Li, Y., 2010, A hybrid statistical method to predict wind
speed and wind power, Renewable Energy [P], vol 35, issue 8, Elsevier,
Oxford England, pp. 1857-1861.
2008
Chen, C., Bai, S., and Angeles, J., 2008, “The Synthesis of Dyads with One
Prismatic Joint,” ASME Journal of Mechanical Design, 130 (3): 034501
(Available online).
Chen, C., Ostrovskaya, S., and Angeles, J., 2008, “The Kinematics of Wheeled
Mobile Robots with Dual-Wheel Transmission Units,” ASME Journal of
Mechanical Design, 130 (1): 011004.
Chen, C., and Angeles, J., 2008, “A Novel Synthesis Approach
of Eight-Bar Linkages to Solve Pose-Synthesis Problem,” Mechanism and
Machine Theory, 43 (7): 882-890.
Chen, C., Bai, S., and Angeles, J., 2008, “A Comprehensive Solution of the
Classic Burmester Problem,” Transactions of the
Canadian Society for Mechanical Engineering, 32 (2): 137-154.
2007
Chen, C.,
Zhang, X., and Angeles,
J., 2007, “Kinematic and Geometric Analysis of a Pure-Rolling Epicyclic
Train,” ASME Journal of Mechanical Design, 129 (8): 852–857.
Chen, C., and Angeles, J., 2007, “Virtual-Power Flow and
Mechanical Gear-Mesh Power Losses of Epicyclic Gear Trains,” ASME Journal of
Mechanical Design, 129 (1): 107-113.
Chen, C., and
Angeles, J., 2007,
“Optimum Kinematics Design of Drives for Wheeled Mobile Robots Based on
Cam-Roller Pairs,” ASME Journal of Mechanical Design, 129 (1): 7-16.
Chen, C., and Angeles, J., 2007, “Generalized Transmission Index
and Transmission Quality for Spatial Linkages,” Mechanism and Machine
Theory, 42 (9): 1225-1237.
Before 2007
Chen, C., and Angeles, J., 2006, “Undercutting
on Cam Profile,”
Transactions of
the
Canadian Society for Mechanical
Engineering, 30 (3): 443-458.
Chen, C., and Angeles, J., 2005, Force-and-Motion-Transmission Evaluation in
Spatial Mechanisms, Transactions of the Canadian Society for Mechanical
Engineering, 29(4): 527-539.
Hayes, M.J.D., Zsombor-Murray, P.J., and Chen, C., 2004, Unified Kinematic
Analysis of General Parallel Manipulators, ASME Journal of Mechanical
Design, 126(5): 866-874.
Chen, C., and Angeles, J., 2004, The Conceptual Design of Epicyclic Cam
Trains, Transactions of the Canadian Society for Mechanical Engineering,
28(2A): 125-138.
referred conference papers
2015
J Chen and C Chen, New Software Package for Power and Efficiency Analysis of Epicyclic Gear Transmissions, to be presented at IFToMM World Congress, Taiwan.
W Au, H Chung, and C Chen, Path Planning of the 6-3 Stewart-Gough Platform in Enhanced Workspace, to be presented at IFToMM World Congress, Taiwan.
S Liu, C Chen, B Chen, and L Harewood, Novel Linkage with Remote Centre of Motion, to be presented at IFToMM World Congress, Taiwan.
A Vignolo, S Briot, P Martinet, and C Chen, End-effector pose estimation of the Monash Epicyclic-Parallel Manipulator through the visual observation of its legs, The 17th International Conference on Advanced Robotics, 2015.
2014
A Vignolo, S Briot, P Martinet, and C Chen, “Comparative Analysis of two Types of Leg-observation-based Visual Servoing Approaches for the Control of the Five-bar Mechanism”, Australasian Conference on Robotics and Automation 2014, Dec 2-4, Melbourne, 2014.
W Au, H Chung, and C Chen, “Path Planning for Assembly Mode Changes for the 3-RRR using Global Workspace Roadmaps”, Australasian Conference on Robotics and Automation 2014, Dec 2-4, Melbourne, 2014.
2013
R Bobade, P Gandhi, and C Chen, 2013, On the Novel Compliant Remote Center Mechanism, Proceedings of the 1st International and 16th National Conference on Machines and Mechanisms (iNaCoMM2013), Dec 18-20, IIT-Roorkee.
R Bobade, P Gandhi, N Bhagat, and C Chen, 2013, Cancellation of Physiological Hand Tremors Using Compliant Robotic Assist, Proceedings of the ASME 2013 International Mechanical Engineering Congress & Exposition IMEC, November 13-21, San Diego.
W Au, H Chung, and C Chen, 2013, Path Planning of the 3-RPR Using Global Workspace Roadmaps, proceeding of the third IFToMM International Symposium on Robotics and Mechatronics, 148-157, October, Singapore.
C Chen and M Pamieta, 2013, Novel Linkage with Remote Center of Motion, proceeding of the third IFToMM International Symposium on Robotics and Mechatronics, 139-147, October, Singapore.
2012
W. Au, C. Chen, and
H. Chung, 2012, Path Planning of Planar Parallel Mechanisms Using Global
Workspace Roadmaps, to be presented in the 2012 ASME International Design
Engineering Technical Conferences & Computers and Information in
Engineering Conference, August, Chicago.
S. Ip, C. Chen,
R.P.H. Chen, and D. Oetomo, 2012, Development of Reconfigurable Spherical
Motion Generator, to be presented in
the Second ASME/IEEE International
Conference on Reconfigurable Mechanisms and Robots,
July, Tianjin.
S. Caro, D.
Chablat, and C. Chen, 2012, Elastostatic Modeling and Shape Optimization of
a 6-DOF Haptic Interface Device, to be presented of the ASME 11th Biennial
Conference on Engineering Systems Design and Analysis, July, Nantes.
2011
R.S. Bobade, C. Chen, P.S. Gandhi, 2011, Review
of Robots for Vitreoretinal Surgery, Proceeding of 15th International
Conference on Mechatronics Technology, November, Melbourne.
C. Chen, T. Gayral, S. Caro, D. Chablat, G.
Moroz, S. Abeywardena, and M. Lyons, 2011, A Six-Dof Epicyclic-Parallel
Manipulator, Proceeding of 15th International Conference on Mechatronics
Technology, November, Melbourne.
C. Chen, 2011, New Parallel Manipulator with
Schoenflies Motion Synthesized via Matrix Pattern Analysis, Proceeding of
15th International Conference on Mechatronics Technology, November,
Melbourne.
S. IP, C. Chen, and D. Oetomo, 2011, Dynamics
Modelling of Reconfigurable Spherical Motion Generator, Proceeding of 15th
International Conference on Mechatronics Technology, November, Melbourne.
2010
Caro, S., Moroz, G., Gayral, T., Chablat, D., and Chen, C., 2010,
Singularity Analysis of a Six-dof Parallel Manipulator using
Grassmann-Cayley Algebra and Grobner Bases, CIM25, December, Montreal.
Chen, C., 2010,
A New Schoenflies Motion Parallel Manipulator,
Proceeding of 2010 IEEE/ASME International Conference on Mechatronic and
Embedded Systems and Applications, July, Qingdao.
Chen, C., Jackson, D., and Heyne, W., 2010,
A new 6-dof 3-legged parallel mechanism for
force-feedback interface, Proceeding of 2010 IEEE/ASME
International Conference on Mechatronic and Embedded Systems and
Applications, July, Qingdao
2009
Ip, S.H., Chen, C., and Oetomo, D., 2009, “Novel 3-DOF Reconfigurable
Spherical Motion Generator with Unlimited Workspace,” Proceeding of the
Australian Conference of Robotics and Automation, Sydney, December.
2007
Chen, C. and Angeles, J., 2007, “The Design of Wheeled Mobile Robots With
Advanced Drives,” Proceeding of the ASME International Design Engineering
Technical Conferences, September, Las vegas.
Chen, C., and Angeles, J., 2007, “Kinematic Synthesis of an Eight-Bar
Linkage to Visit Eleven Poses Exactly,” Proceeding of the 12th World
Congress in Mechanism and Machine Science,
Besançon,
June.
Bourrelle, J.S., Chen, C., Caro, S., and Angeles, J., 2007, Graphical User
Interface to Solve the Burmester Problem, Proceeding of the 12th World
Congress in Mechanism and Machine Science,
Besançon, June.
Zsombor-Murray, P.J., and Chen, C., 2007, Two Degrees of Freedom Parallel
Manipulators and the Burmester Problem, Proceeding of the 12th World
Congress in Mechanism and Machine Science,
Besançon, June.
Before 2007
Chen, C., and Angeles, J.,
2006, “Undercutting on Cam Profile,” Proceeding of the
Canadian Committee for the Theory of Machines and Mechanisms Symposium on
Mechanisms, Machines, and Mechatronics, Calgary, May.
Chen, C., and Angeles, J., 2005, A General Transmission Index for Spatial
Linkages, Proceeding of the ASME International Design Engineering Technical
Conferences, Long Beach, September.
Chen, C., and Angeles, J., 2005, Force Transmission Evaluation in Spatial
Mechanisms with Higher Pairs, Proceeding of the Canadian Committee for the
Theory of Machines and Mechanisms Symposium, Saint-Hubert, May.
Chen, C., and Angeles, J., 2005, A General Transmission Index for Spatial
Mechanisms and Its Application on Mechanisms with Higher Pairs, Proceeding
of the Canadian Congress of Applied Mechanics, Montreal, May.
Chen, C., Ostrovskaya, S., and Angeles, J., 2004, The Kinematics of Wheeled
Mobile Robots with Dual-Wheel Transmission Units, Proceeding of the ASME
International Design Engineering Technical Conferences, Salt Lake City,
September.
Chen, C., and Angeles, J., 2003, The Conceptual Design of Epicyclic Cam
Trains, Proceeding of the Canadian Committee for the Theory of Machines and
Mechanisms Symposium on Mechanisms, Machines, and Mechatronics,
Saint-Hubert, May.
Chen, C., and Angeles, J., 2003, A Generalization of the Pressure Angle,
Proceeding of Canadian Committee for the Theory of Machines and Mechanisms
Symposium on Mechanisms, Machines, and Mechatronics, Saint-Hubert, May.
Zsombor-Murray, P.J., Chen, C., and Hayes, M.J.D., 2002, Direct Planar
Kinematics Mapping for General Planar Parallel Manipulator, Proceeding of
the Canadian Society for Mechanical Engineering Forum on Robotics and
Control, Kingston, May.