
| Experiment
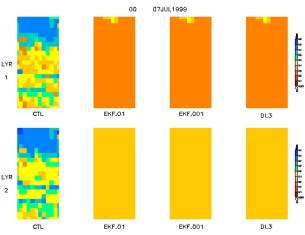
Result 3: Model
Error Variance Impact |
|
|
|
|
|
|
|
|
|
|
|
|
| EKF data
assimilation |
|||||||||||
| with
higher model
error |
|||||||||||
| variance catches up to |
|||||||||||
| the control runs faster |
|||||||||||
| than that with lower |
|||||||||||
| model error covariance |
|||||||||||
| (the obs error variance |
|||||||||||
| was set as 0.005fc). This |
|||||||||||
| is because EKF updates |
|||||||||||
| the state estimates |
|||||||||||
| based on the relative |
|||||||||||
| magnitudes of the model |
|||||||||||
| and observation |
|||||||||||
| variances. |
|||||||||||